Divulgação
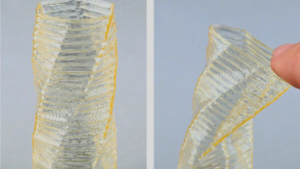
Pesquisadores da Universidade Johannes Kepler, na Áustria, construíram um dedo robótico semelhante a um tentáculo usando gelatina e açúcar como ingredientes principais. Eles, literalmente, cozinharam esses materiais e depois fabricaram o dispositivo utilizando uma impressora 3D.
Atualmente, os robôs macios não são feitos de materiais biodegradáveis porque esses compostos, na maioria das vezes, possuem várias limitações como alta solubilidade em água, modelagem reduzida e vida útil muito limitada, o que dificulta sua aplicação em escala industrial.
“Ao utilizar açúcar e gelatina para fabricar objetos gelatinosos, nós criamos dispositivos menos propensos ao mofo por causa da adição de ácido nítrico. Além disso, acrescentamos glicerol para tornar o dedo robótico mais resistente à agua”, explica o professor de ciência de materiais Florian Hartmann, coautor do estudo.
Receita caseira
Com a adição de ácido cítrico à receita, os cientistas conseguiram alterar o pH do material, evitando o surgimento de microrganismos que poderiam se alimentar do composto. Já o glicerol ajudou a manter o gel hidratado, fazendo com que o dispositivo pudesse ser esticado até seis vezes o seu comprimento original sem danificar sua estrutura.
Para usar esse material como “tinta” em uma impressora 3D convencional, os pesquisadores aqueceram o composto até atingir um ponto mais suave, permitindo que ele fosse esguichado por um bico de impressão comum e que a tinta se solidificasse mais rapidamente em temperatura ambiente.
“Normalmente, os robôs macios impressos em 3D utilizam polímeros que demoram muito para assentar e solidificar, o que significa que imprimi-los leva um tempo impraticável. Mas a gelatina tem uma vantagem: como proteína, ela pode cristalizar e produzir impressões viáveis muito mais rápido do que os polímeros”, acrescenta Hartmann.
Dedo robótico
Para fazer o dedo se mexer, os cientistas utilizaram um exoesqueleto feito de um material à base de etanol e goma laca — resina usada como verniz em peças decorativas. Essas tiras são sensíveis à forma como a luz é refratada, se dobrando à medida que passa entre o dedo e o ar ao seu redor.
Esse sistema permite controlar o dedo robótico de gelatina e açúcar impresso em 3D, apenas pressionando ar comprimido nele. Quando esse ar em movimento muda o ângulo de refração da luz que passa por ele, as tiras balançam, fazendo com que o dispositivo possa agarrar ou empurrar objetos mais pesados.
“Robôs de gelatina provavelmente nunca levantarão peso suficiente para construir carros, mas eles podem ser usados para entrar em ambientes sensíveis, como áreas altamente radioativas, ou “nadar” dentro do corpo humano para levar medicamentos ou reparar tecidos danificados”, conclui o professor Florian Hartmann.
Fonte: Canaltech